Mini Pupper(ミニぷぱ) レビュー
2022/2/21
MangDang Technology社より「Mini Pupper」をご提供頂きました!


この記事では実際にロボットを組み立てて動かすまでの過程をご紹介しながら,思ったことや躓いた点について触れていきます!
Mini Pupperは現在,クラウドファンディングサイトの「Makuake」で2/28まで受け付け中です.
組み立て
Mini Pupperには丁寧な公式チュートリアルがあり,これに従って組み立てます.本格的な小型ロボットの組み立ては初めてでしたが,ミス等含め7時間ほどで無事に組み立てることができました!
脚を4つ作り,ロボットに組み込んでいきます.

脚に用いられているサーボモータは専用に作られたもののようです. 一般に流通しているSG90サーボモータと同じ形状をしていますが,ギアが金属製になっており,よりパワフルになっています!

脚を取り付け終えるとMini Pupperの形が見えてきました!
組み立てに使う工具はキットに付属していますが,六角レンチの金属が比較的脆く組み立てていくにつれネジをなめやすくなってしまったので,余裕があればホームセンター等で購入するのをお勧めします.使用する六角レンチは1.5mm,2.0mmの二本です.
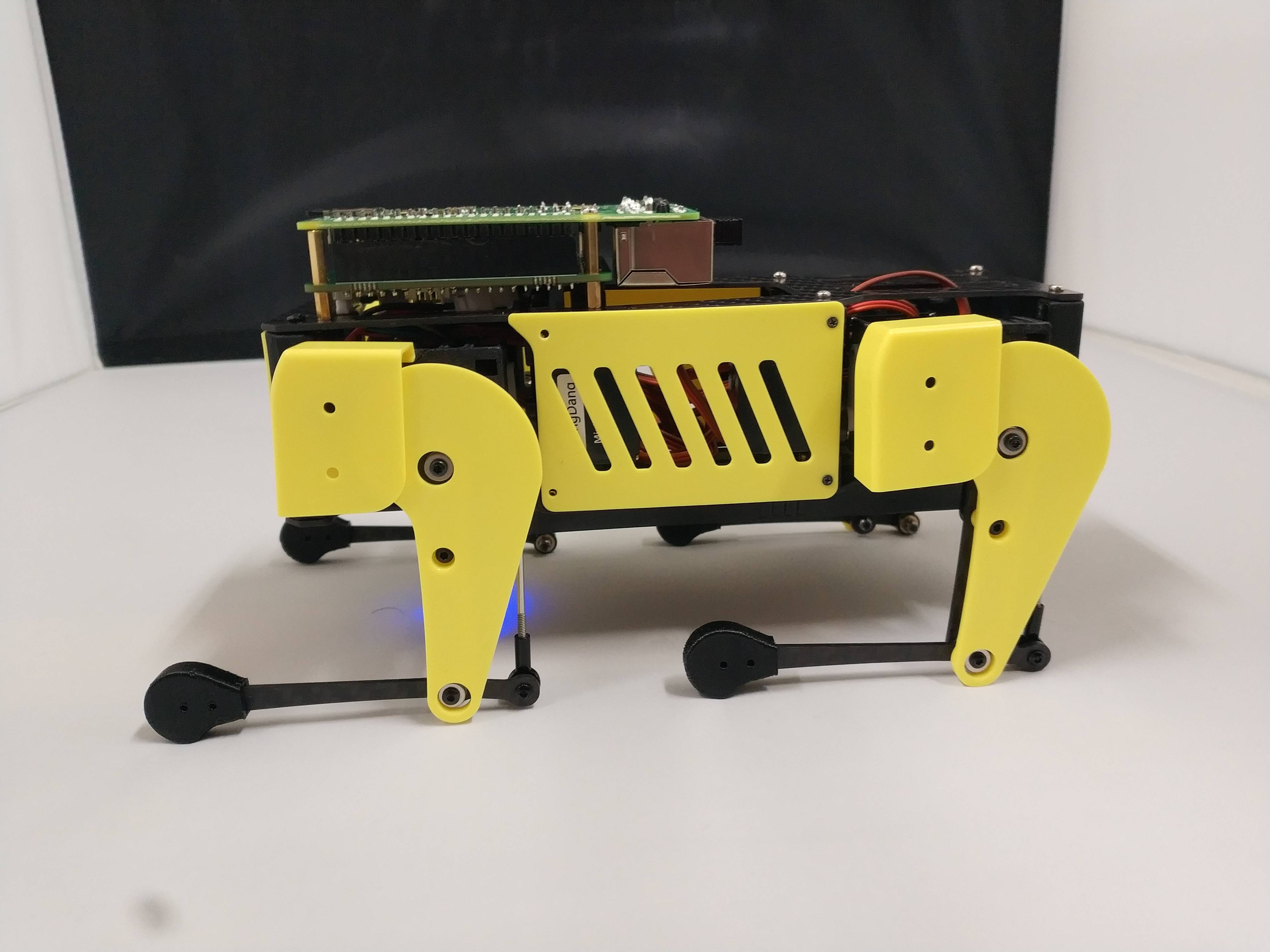
制御回路と外装をつけます.
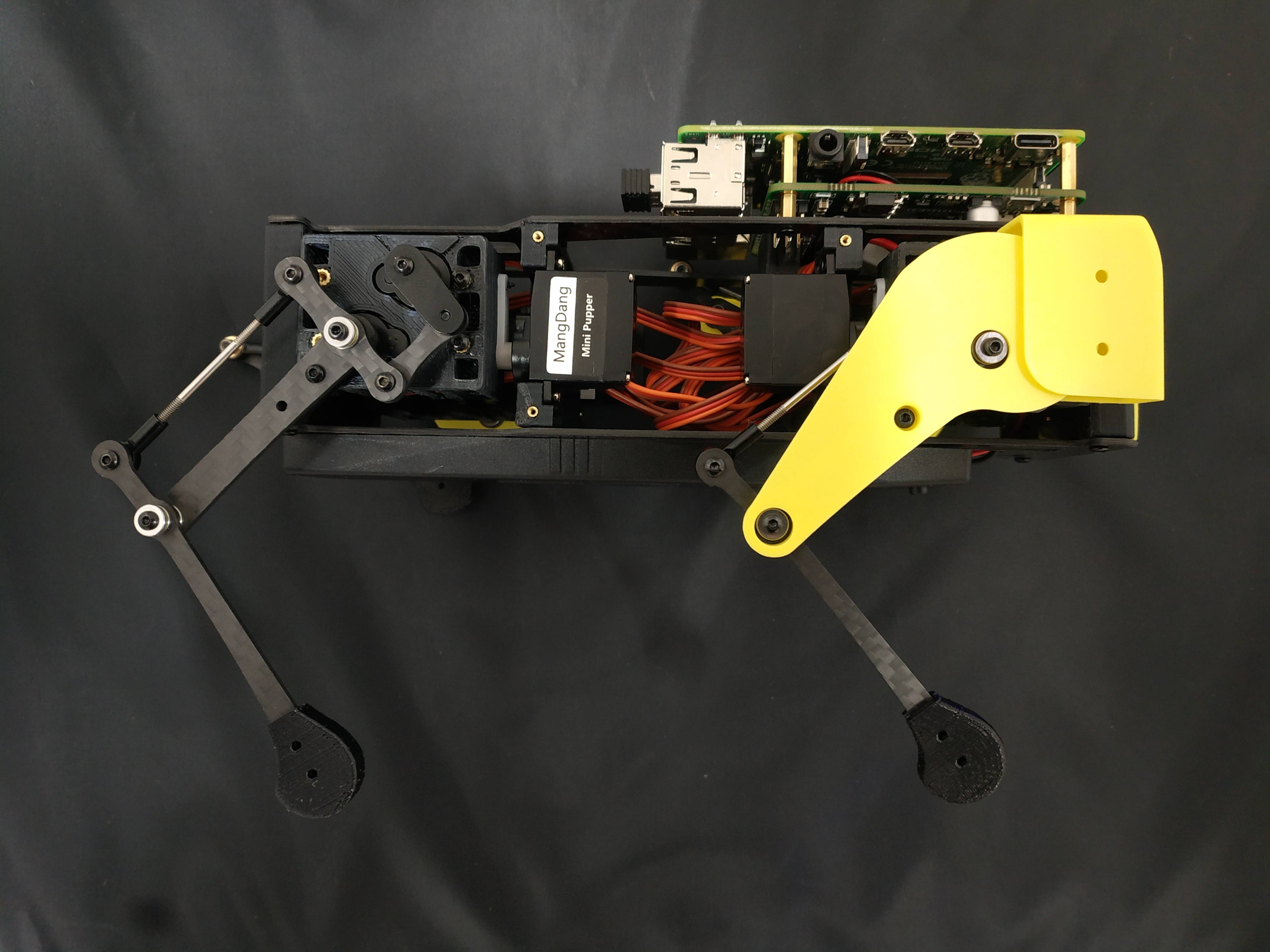
可愛らしいボディのMini Pupperが出来ました!

ソフトウェア設定
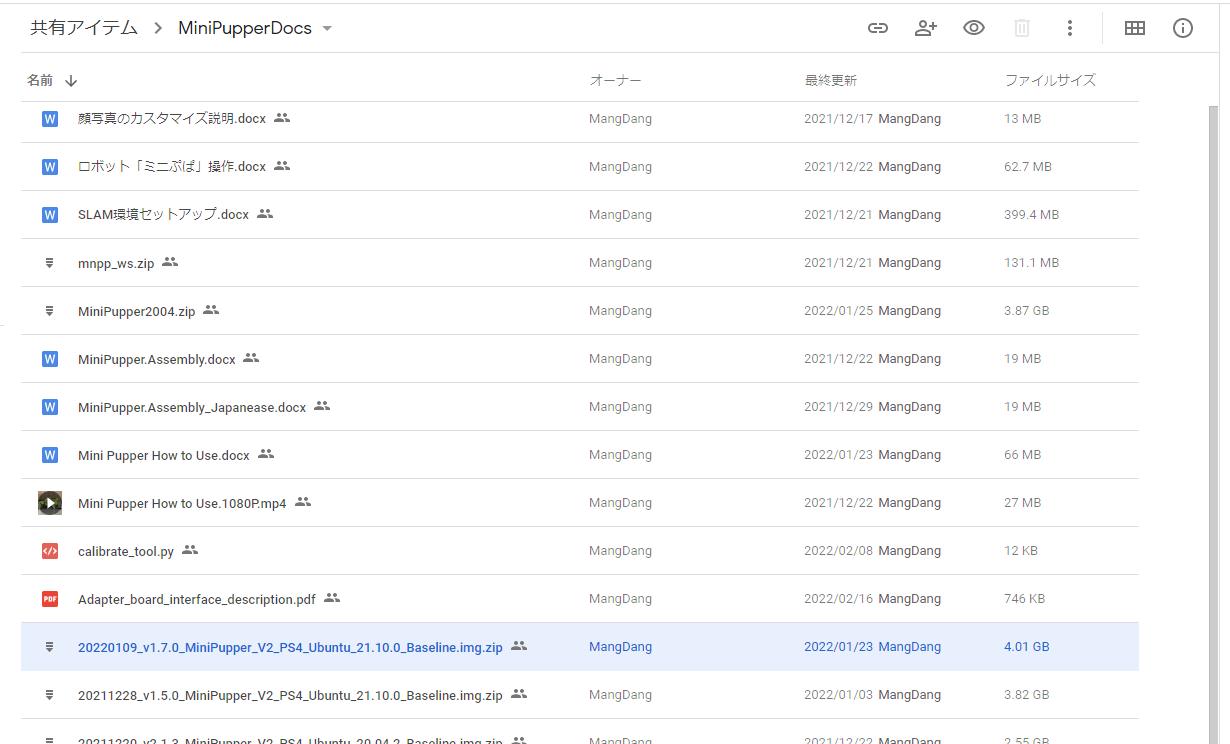
こちらも公式チュートリアルを参照しながら進めていきます, 初めにSDカードにOSを書き込みます.こちらを参照しつつ対応するOSイメージファイルを公式Docsよりダウンロードします.今回はv1.7.0をダウンロードしました.
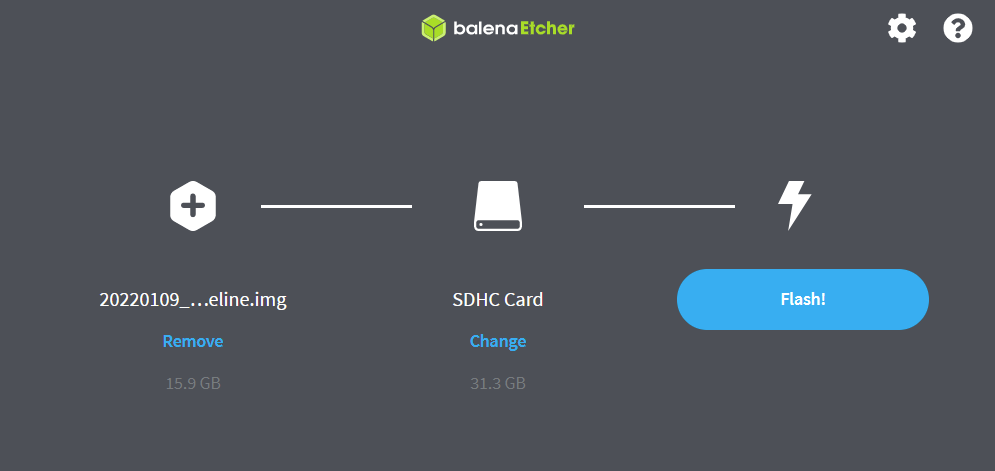
書き込みソフトであるBalena Etcherをダウンロードして実行し,SDカードに先ほどダウンロードしたOSイメージを書き込みます.
(筆者の環境では初め70%のところで書き込みに失敗してしまいましたが,SDカードをフルフォーマットする事で無事書き込むことができました.)
書き込みを終えたらRaspberry Piに差し込み,バッテリーの電源を入れて起動します.

しばらくすると正面のディスプレイに顔が現れます.
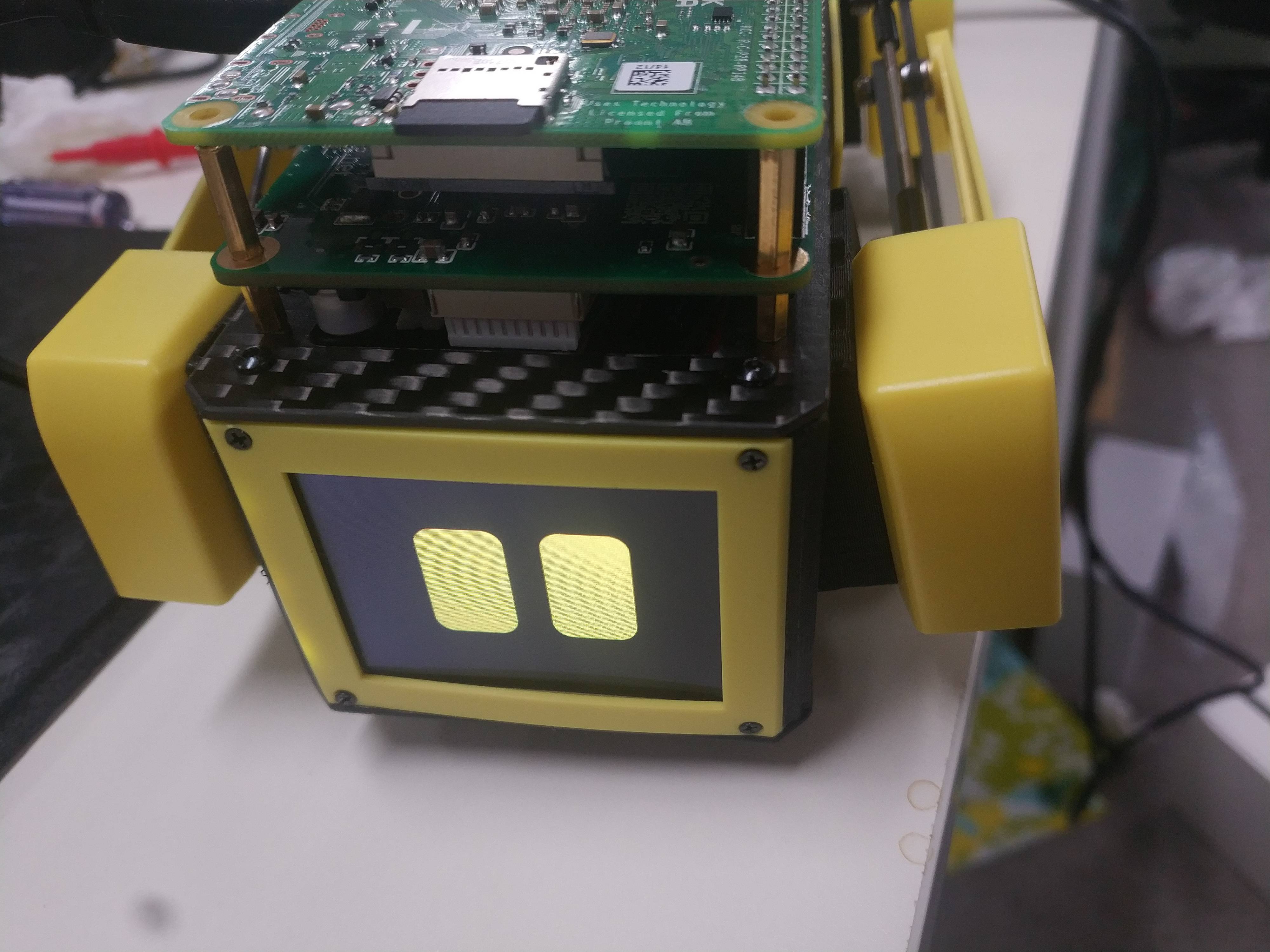
また起動時にサーボモータが急に動いたような音がしますが,どうやらモーターの音ではなく起動音のようです.お茶目ですね.
Ubuntuが立ち上がったらチュートリアルに従ってインターネット接続を有効にし,その後キャリブレーションを行います.キャリブレーションツールを立ち上げると今度は本当にサーボモータが急に動くので,机から元気に飛び出さないように注意しましょう.(経験談)
ここでは脚の角度を調整するのですが,サーボモータの制御角(サーボモータが駆動できる角度)も併せて確認する必要があります.
一般的なサーボモータは制御角の外まで回らないよう,ストッパーが歯車についています.
しかしながら本機に採用されているサーボモータにはストッパーがついていません.そのため,制御角の外までサーボモータが回っている場合,キャリブレーションツールのツマミを動かしても動かなかったり,異常動作をしたりすることがあります.
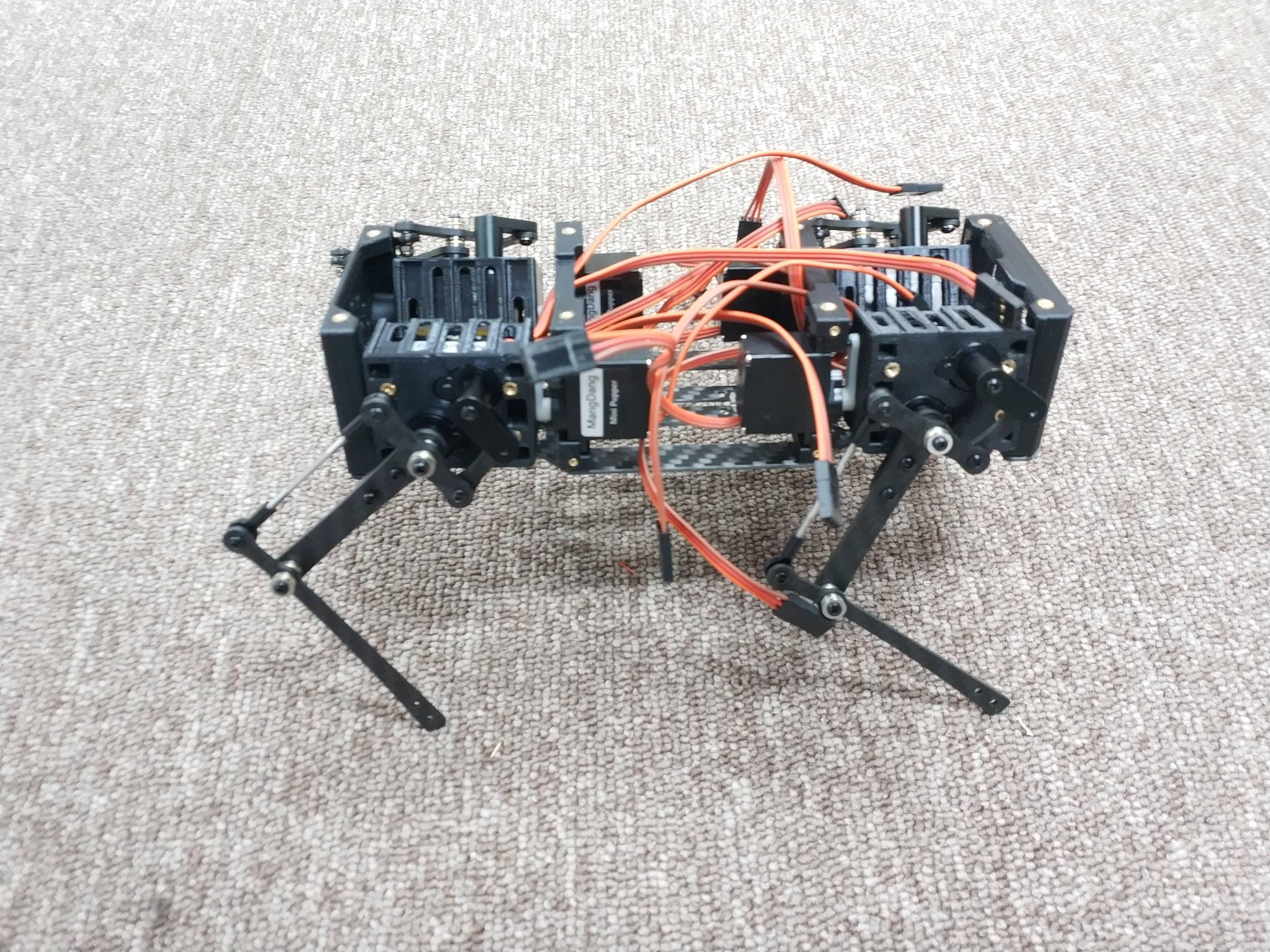
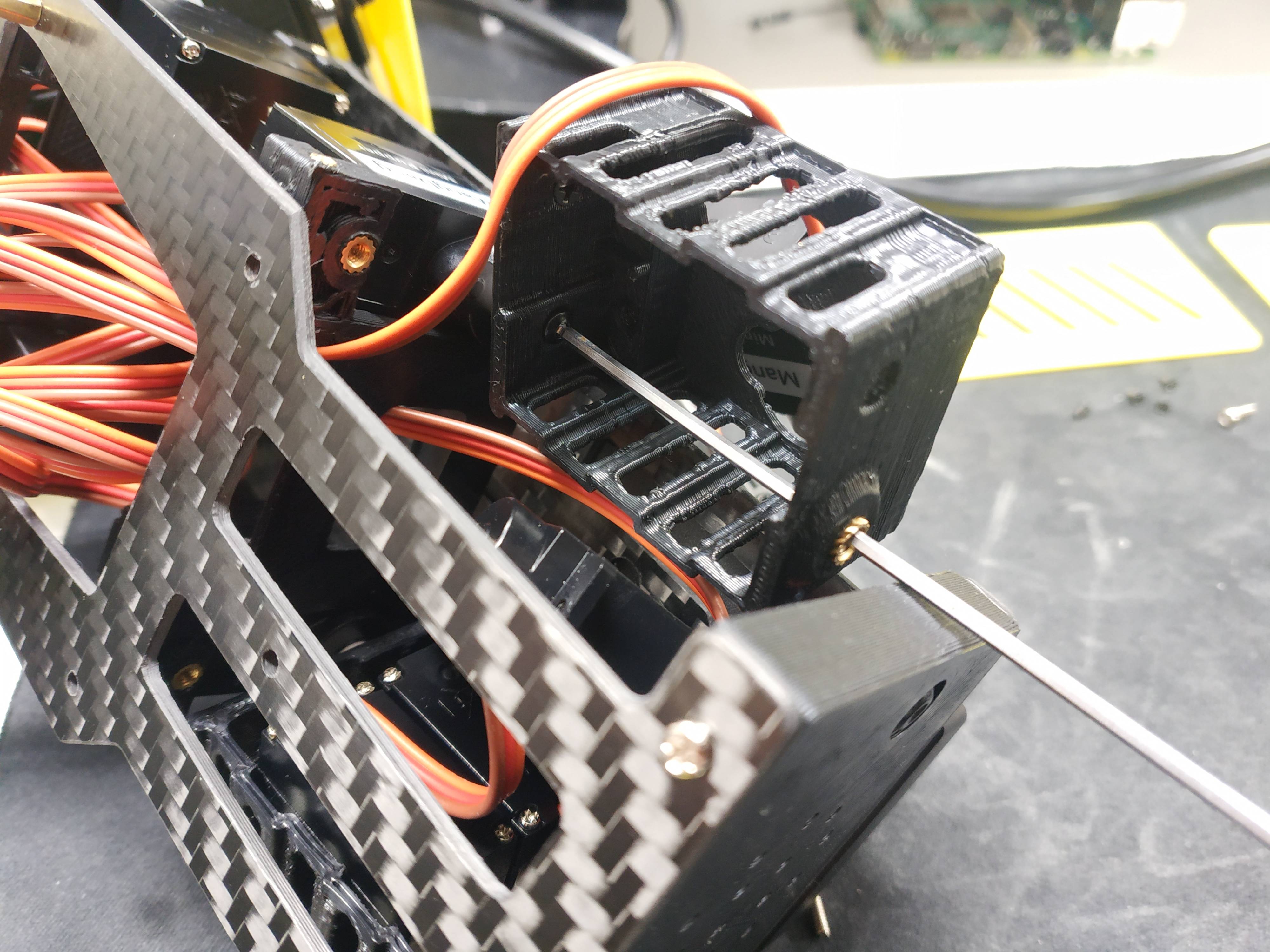
このような症状がみられる場合,一度サーボモータから脚を外して位置を調整することで解決します.筆者の場合後脚の付け根が正しく動かなかったため,写真の位置まで解体が必要でした…
精密な関節角度は執筆時点で明記されていないようです.今回は写真のように大まかに揃えました.
操縦
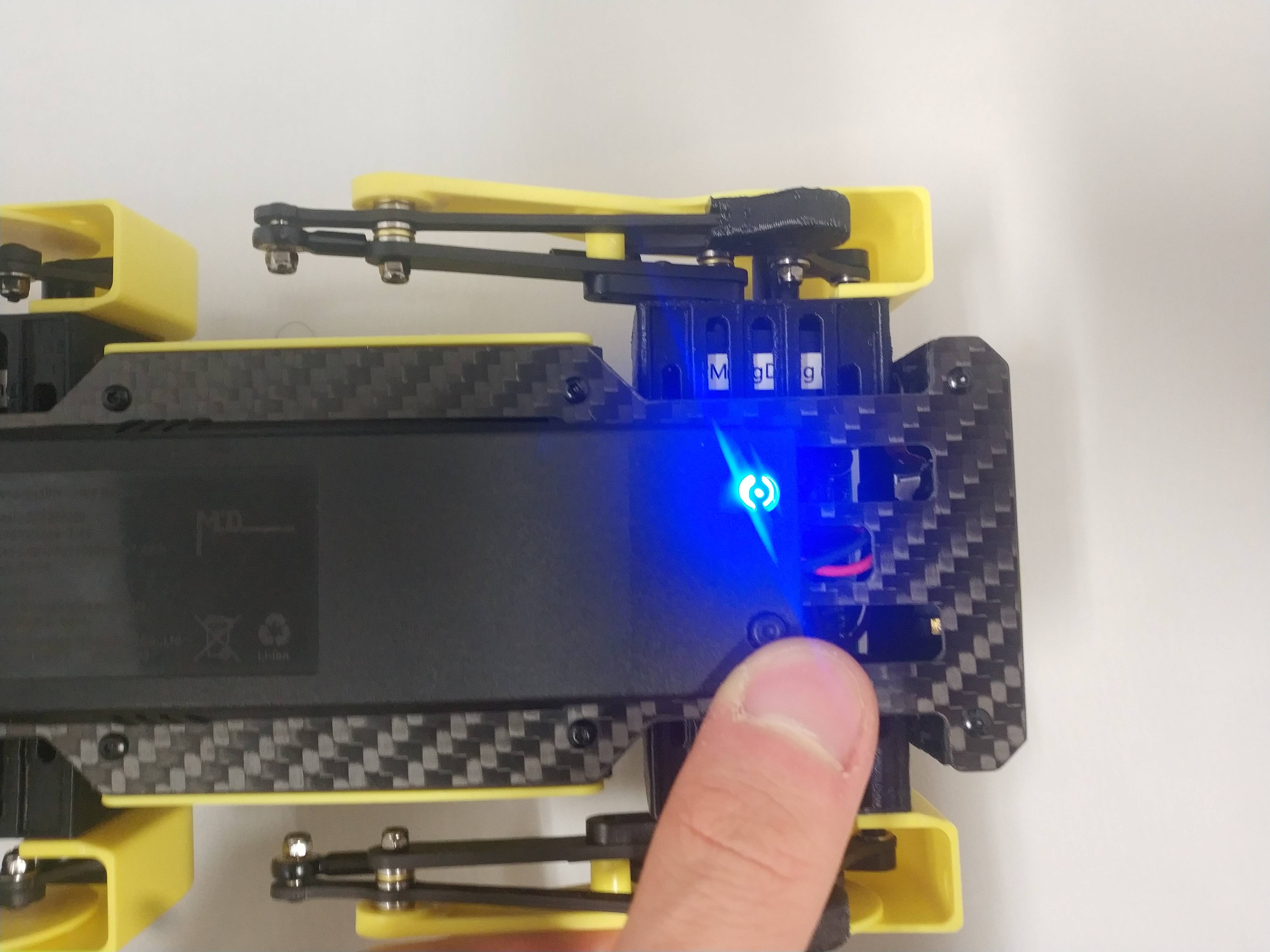
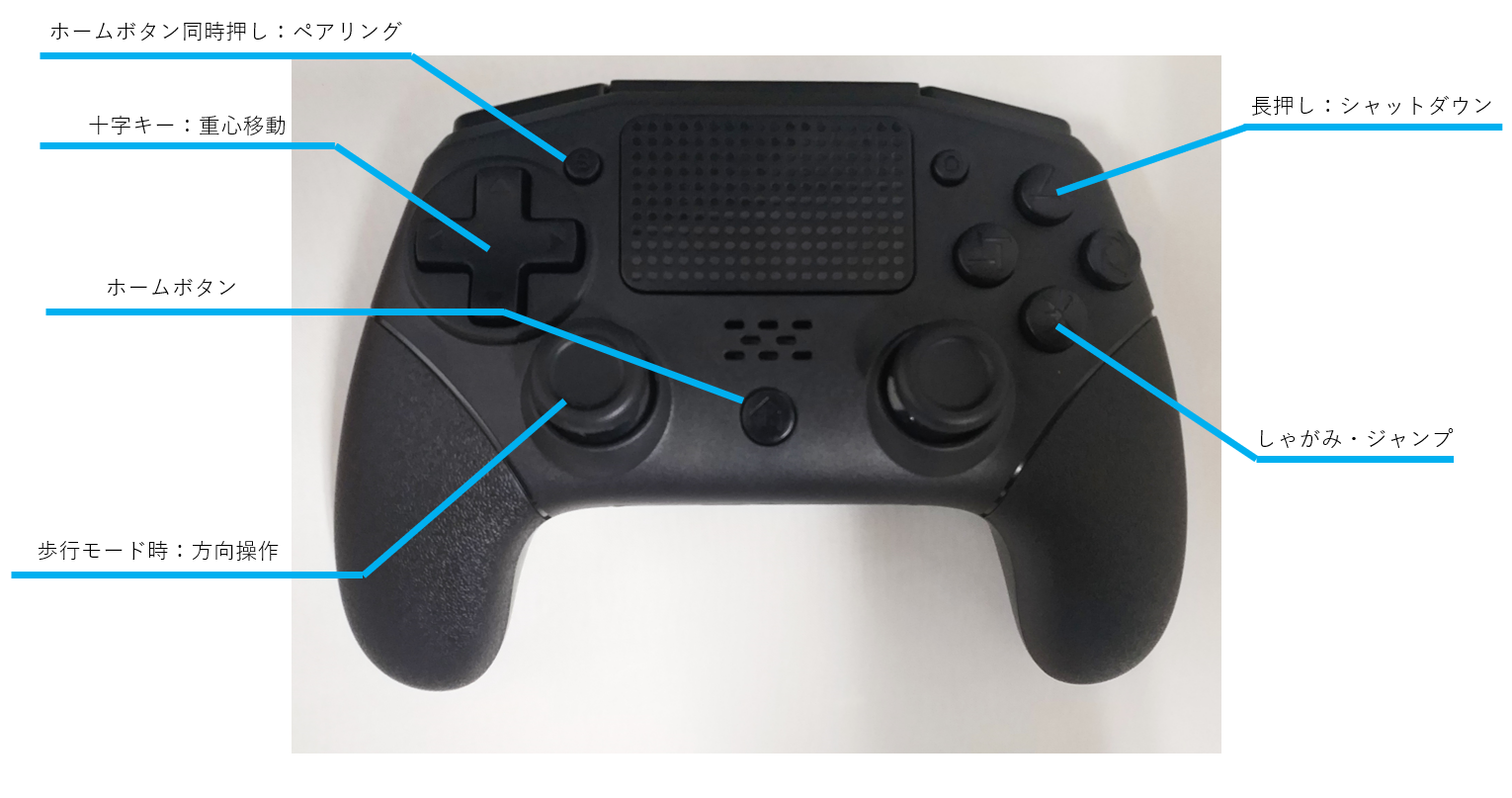
付属のPS4コントローラを用いることで,簡単に操縦することができます! コントローラのStartボタンとホームボタンを同時に長押しするとペアリングモード(青白いランプが二回点滅)に入ります.

Mini Pupperとの接続に成功すると,背のランプが緑色になります.

主な操縦に必要な入力は以下のように設定されています.L,Rを順に押すとMini Pupperはその場で足踏みをはじめ,この状態で左スティックを倒すとその方向に向かって歩きます

ぷぱぷぱー!
歩いている動画
ぷぱぷぱ~! pic.twitter.com/3wzGdvHde3
— 電通大deラボ (@uec_de_lab) February 21, 2022
おわりに

今回は操縦までの流れを実際に辿りながらご紹介しました.
簡単に作り動かせるMini Pupperは4足歩行ロボットの入門用に最適であると言えます.
また,その後もRaspberry Piの持つ高い拡張性を生かすことで,長く楽しむ事ができるロボットです.今後も少しずつ新しい機能を試していこうと思います!
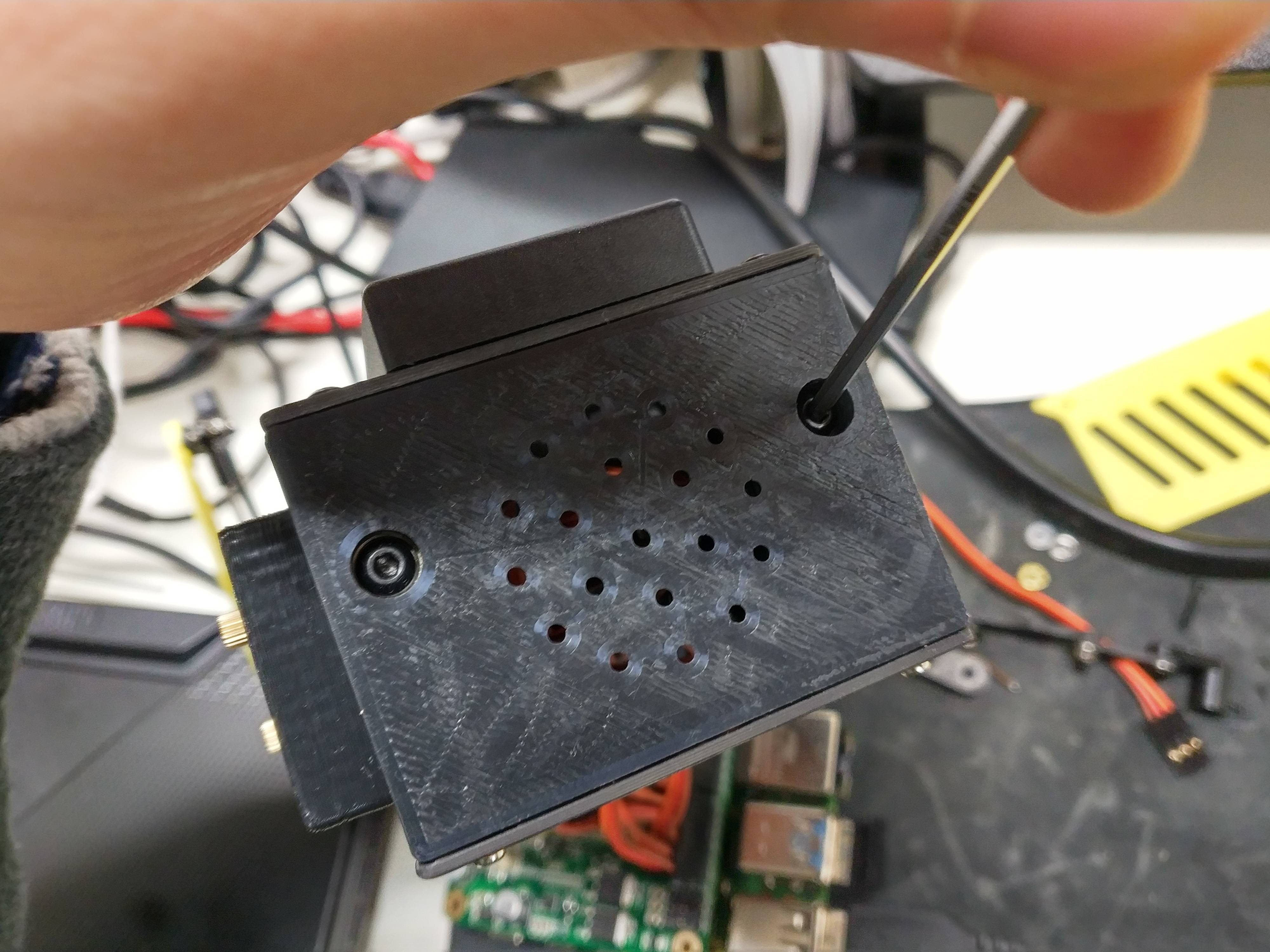
コントローラによる操縦の他にもMini Pupperには様々な機能が用意されています.例えばLiDAR(別売)やカメラモジュール(別売)をマシン後部に取り付けることで,自動ナビゲーションや写真撮影を行う事ができるそうです.